













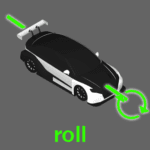
 ROLL – Rotation about the horizontal longitudinal axis that runs from the front to the rear, through the center of mass. Roll motion in racing simulation applications is utilized for simulating body roll or left/right weight transfer, and unsustained lateral “G-Force” sensations in response to steering wheel input.
ROLL – Rotation about the horizontal longitudinal axis that runs from the front to the rear, through the center of mass. Roll motion in racing simulation applications is utilized for simulating body roll or left/right weight transfer, and unsustained lateral “G-Force” sensations in response to steering wheel input. PITCH – Rotation about the horizontal lateral axis that runs from the left to the right, through the center of mass. Pitch motion in racing simulation applications is utilized for simulating front/rear weight transfer and unsustained longitudinal “G-Force” sensations associated with forward and rearward accelerations, in response to throttle and brake pedal input.
PITCH – Rotation about the horizontal lateral axis that runs from the left to the right, through the center of mass. Pitch motion in racing simulation applications is utilized for simulating front/rear weight transfer and unsustained longitudinal “G-Force” sensations associated with forward and rearward accelerations, in response to throttle and brake pedal input. YAW – Rotation about the vertical axis that runs up and down, through the center of mass. Yaw motion in racing simulation applications is utilized for simulating oversteer (loss of rear traction) and understeer (loss of front traction) of the car, in response to steering wheel, throttle and brake pedal inputs.
YAW – Rotation about the vertical axis that runs up and down, through the center of mass. Yaw motion in racing simulation applications is utilized for simulating oversteer (loss of rear traction) and understeer (loss of front traction) of the car, in response to steering wheel, throttle and brake pedal inputs. SURGE – Linear or translational motion along the longitudinal axis that runs from the front to the back, through the center of mass. Motions on the surge degree of freedom are associated with forward and rearward accelerations and decelerations, typically associated with throttle and brake pedal inputs, but can be influenced by environmental conditions such as curbing and tire barriers.
SURGE – Linear or translational motion along the longitudinal axis that runs from the front to the back, through the center of mass. Motions on the surge degree of freedom are associated with forward and rearward accelerations and decelerations, typically associated with throttle and brake pedal inputs, but can be influenced by environmental conditions such as curbing and tire barriers.  SWAY – Linear or translational motion along the lateral axis that runs from the left to the right, through the center of mass. Motions on the sway degree of freedom are associated with left and right accelerations and decelerations, typically associated with steering wheel inputs, but can be influenced by environmental conditions such as soft or loose surfaces.
SWAY – Linear or translational motion along the lateral axis that runs from the left to the right, through the center of mass. Motions on the sway degree of freedom are associated with left and right accelerations and decelerations, typically associated with steering wheel inputs, but can be influenced by environmental conditions such as soft or loose surfaces.  HEAVE – Linear or translational motion along the vertical axis that runs up and down, through the center of mass. Motions on the heave degree of freedom are associated with up and down accelerations and decelerations, typically associated with environmental conditions such as incline/decline transitions, track surface imperfections such as cracks and bumps, and curbing.
HEAVE – Linear or translational motion along the vertical axis that runs up and down, through the center of mass. Motions on the heave degree of freedom are associated with up and down accelerations and decelerations, typically associated with environmental conditions such as incline/decline transitions, track surface imperfections such as cracks and bumps, and curbing.